
以创新发展为用户,红旗携3大子品牌强势阵容亮相北京车展

来源:汽车商业评论(钱亚光)8月31日 14:35
在过去的一段时间里,由于L4赛道企业短期实现不了商业应用落地,自身难以造血,一旦资金断供,生存就成了问题。大多曾主攻L4自动驾驶的公司转向L2+级方案,为车企提供可量产辅助驾驶方案,寻求生存空间。
以Robotaxi起家的文远知行已联合博世开展应用于乘用车的L2-L3级自动驾驶软件的开发;轻舟智航在专注Robobus领域以外推出了面向主机厂的前装量产解决方案;而小马智行也在同时布局自动驾驶出行服务、自动驾驶卡车,以及乘用车辅助驾驶业务三大前台业务板块。
一些智能驾驶解决方案的供应商,开始利用自身的优势,为车企赋能,帮助车企实现数据采集、数据闭环的能力。大有时空就是这样一家拥有完全自主可控技术的精准时空数据服务与智驾解决方案提供商。
在近日的2023 ICVS中国自动驾驶博览会上,展位最显眼的大有时空荣获“闪耀中国·2023 ICVS中国自动驾驶风云盛典”年度评选“自动驾驶创新技术奖”。

本次评选是旨在聚焦自动驾驶行业发展,在发挥优秀企业的积极能量基础上,树立标杆形象,推动自动驾驶产业商业化落地。此次获奖,再次证明了大有时空技术创新能力以及行业先导能力。
大有时空全称是国汽大有时空科技(安庆)有限公司,是由国家智能网联汽车创新中心孵化设立的科创企业,股东包括安庆新能源、慧心联智、国汽云控、国科新能、讯腾智科、国汽众志和众星格物等。

该公司于2021年2月注册成立,注册资本5532.8万元。其总部位于安徽省安庆市,在北京、成都、武汉、重庆、广州等地设有研发和技术中心,员工超300人,研发及工程技术人员占比超过80%。
目前,大有时空已获批1项甲级测绘资质和8项乙级测绘资质,在安庆建有位置测试网,并配有专门测试车和四个实验室,参与多所大学、测绘院和城市的北斗专项课题研究。
目前,大有时空拥有 PPP-RTK、N-RTK、卫惯组合、融合感知、车端 BEV、自动建图与更新、地理信息可视化的核心算法和技术,面向智能驾驶数据闭环三大难点(量产、合规和数据管理平台)构建商业模式,为智能驾驶车辆提供精准位置信息平台服务、智能终端(车端感知)和众包地图数据更新工具链和服务。
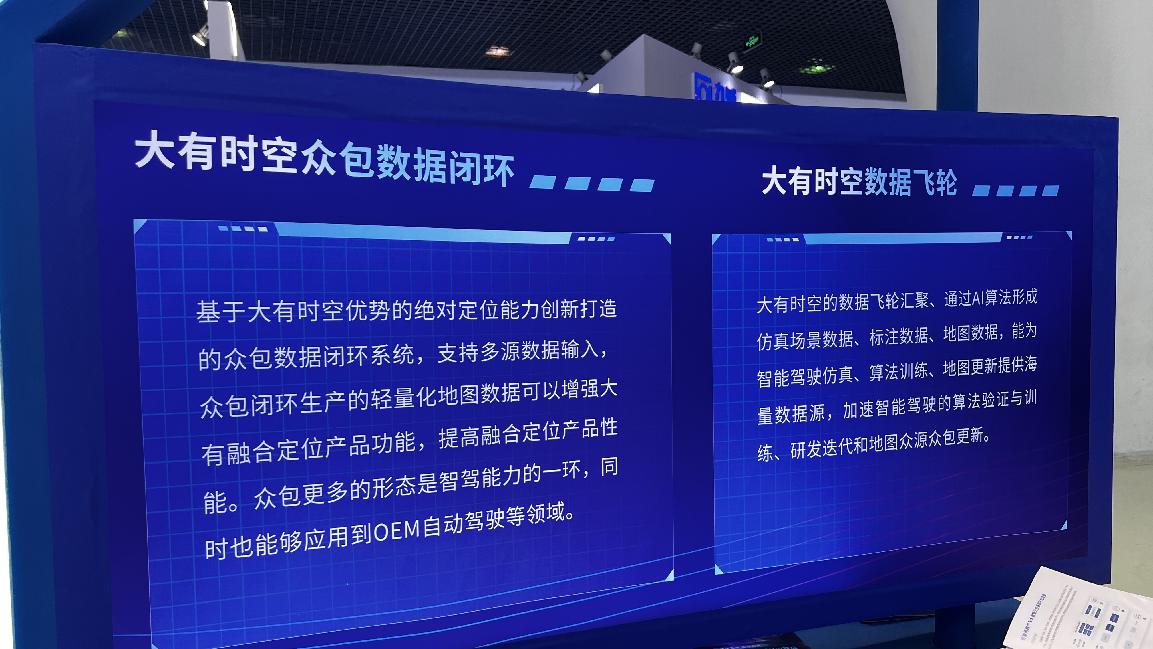
本次展会上,大有时空展出了基于绝对定位能力优势创造的众源众包数据闭环系统,及通过闭环系统形成的仿真场景数据、高精度地图数据等海量数据源,加速AI感知算法的验证与训练、智能驾驶系统的研发迭代。

展会期间,大有时空CTO李庆建接受了包括汽车商业评论在内多家相关媒体的采访,全面阐述了大有时空的最新解决方案。
据他介绍,智能驾驶需要融合定位技术来克服传感器的局限性,提高定位精度,实时更新纠正,增强系统的安全性、可靠性和适应性,以应对复杂多变的道路环境和任务。

大有时空的产品服务主要包含两条线。第一个是‘’卫星定位一张网,智能驾驶全球通“的高精定位服务。
卫星定位是智能汽车的一个时空基准,唯一的绝对定位技术,但它无法解决汽车的全场景的问题。比如说在立交桥下信号没有覆盖的时候,车辆的精准定位是无法用卫星定位去保障。
大有时空通过集成多种传感器,如激光、视觉、地图和惯性导航结合卫星定位系统,将多源数据汇聚,进行融合和优化,形成多源融合定位
在此基础上,以卫星定位、高精地图、感知构成融合定位,同步进行车端局部建图,构成精准的定位能力。让定位和地图强关联,形成统一的时空基准,协助地图采集,加强采集的精准性。目前,大有时空卫导高精度定位服务已经更新到第四代差分服务PPP-RTK,并实现了覆盖全球。
第二个是围绕智能汽车量产的整个地图技术路线,帮助车厂打造数据中心,在高精度地图实时更新的数据闭环基础上,赋能车厂安全合规运营,从而形成统一时空基准的量产融合感知解决方案。
在当下的自动驾驶领域,轻地图、重感知已成趋势,好多车企都放弃了高精地图。

李庆建表示,大有时空的轻地图路线是先在车端局部建模生成地图,训练自动驾驶的感知和决策,形成车端的算法,基于人工智能三位一体的整体结构,通过此结构进行感知、决策、控制形成一个完整的数据闭环,推动智能驾驶汽车由低阶智能进化到高阶智能。
之所以称之为轻地图,李庆建认为,主要是和传统地图有两个区别:
第一,是它相较于传统高精地图的要素在数量以及精度上会略微降低,这和感知及决策的算法有关系。传统高精地图,把要素做得非常全,而目前自动驾驶的方案或者感知算法并不需要很多要素,要素减少就是轻地图。
第二,是它不依赖于专业的测绘车去采集,而是采用众源众包的方式去采集获取,并且形成实时的更新能力,这是轻地图重要的闭环,否则不能称之为轻地图。
大有时空闭环式的数据采集,是使用智能驾驶车等,通过众源众包的方式,解决地图更新的成本问题。智能驾驶车的整个测试验证示范以及量产的运营闭环过程,就是地图数据生成采集更新工作的过程。
大有时空通过轻地图服务解决实时更新问题,从而驱动算法训练至建图与实时更新能力的成熟。
这种能力成熟也意味着车厂研发、测试、运营、高级别自动驾驶的一个能力的成熟,所以说自动驾驶算法训练的不断积累,形成高阶的智能。从而摆脱对数据、导航地图等要素的依赖,提供轻地图服务,这也是大有时空数据闭环方案的核心竞争力。
除了数据归属,数据采集,与其他图商相比,大有时空的核心优势首先在于赋能车厂,帮助车厂建立完整的数据闭环与数据更新能力。
当今智能驾驶领域,正在从低阶智能向高阶智能的转变,这是构建在数据闭环轮回的基础之上,涵盖车端感知、数据更新、算法训练及算法应用等环节,准确地感知周围环境,从而建立环境模型并识别潜在障碍物,通过不断算法优化来提升系统性能。
李庆建介绍,在自动驾驶汽车的研发、测试和运营过程中都需要数据,首先是研发的测试,采集的数据在标注之后做算法训练;第二个是生成仿真场景,解决长尾场景;第三个是地图的更新,实时生成地图服务,但这三个功能无论是汽车在研发,还是示范运营,皆需要解决整个闭环。
现阶段的产品规划,形成了全球定位服务,然后是卫惯组合算法,以及域控的解决方案。在这个基础上结合视觉、毫米波和激光雷达的感知,形成感知算法,变成一个车端局部建图的引擎。
局部建图之后再到云端,形成云端并基于 AI的自动化实时更新的全局地图构建能力,经过编译之后再下发到车端。
而在大有时空的远期目标上,首先是要解决新型测绘和智能驾驶高精地图数据的双向赋能,再把这套感知实时算法的能力,反馈到传统测绘的基础上去。
其次,基于自动驾驶汽车的地图实时更新,赋能到传统测绘领域,如智能交通、智慧城市等。
李庆建表示,大有时空帮助车厂建立整个数据闭环的更新解决方案之后,并不需要引入车企数据,反而会把自己的基础数据、测绘数据、运营车辆数据进行训练后,赋能到汽车厂商,解决汽车数据量不足的问题。

同时,大有时空会帮助车企建立一套新的自动驾驶数据中心闭环供应链系统,布置在它的数据中心,并以合规运维确保数据中心在地理信息的数据合规安全,然后在这个过程中更新地图,帮车企生成标注算法训练仿真场景的数据源。
据李庆建介绍,目前大有时空已经与奇瑞、智己等多家主机厂,在车端地图引擎、融合定位引擎等方面进行了深度合作,并在联合研发和匹配数据中心的供应链。这种深度的合作需要和车端应用软件、智能驾驶软件深度联调,包括闭环供应链,实际上是一个紧耦合的联调适配的过程。
不久之后,大有时空还会在北京亦庄推出系统试运营,然后再推广到5个高精地图试点,推动量产智能汽车众源更新监管应用。



